his is the second of a three-article series devoted to the correlation between the insertion loss and input impedance of passive EMC filters. In the first article, [1], LC and CL filters were discussed. This article focuses on π and T filters. Analysis, simulation, and measurement results show that the frequencies at which the insertion losses of these filters are equal are the same frequencies at which the input impedances are equal. These frequencies define the regions where one filter configuration outperforms the other (with respect to the insertion loss). To determine these regions analytically, we compare the input impedances of the two filters. The next article will focus on cascaded LC and CL configurations.
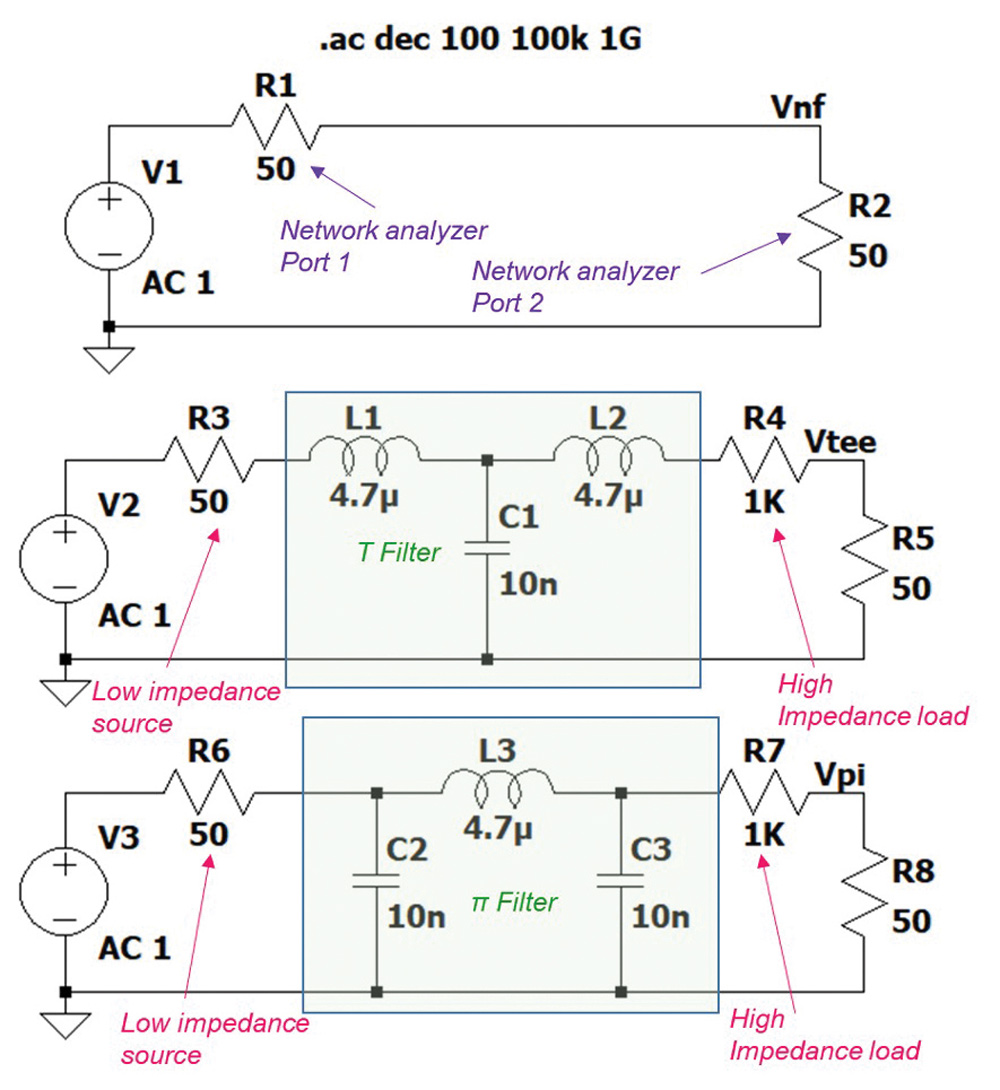
 IN , to the π filter is calculated from the circuit shown in Figure 1.
IN , to the π filter is calculated from the circuit shown in Figure 1.
This impedance is in series with the impedance of the inductor

which, in turn, is parallel with the impedance of the capacitor. Thus, the input impedance to the filter is


or, in terms of the frequency

The magnitude of the input impedance is

 IN , to the T filter is calculated from the circuit shown in Figure 2.
IN , to the T filter is calculated from the circuit shown in Figure 2.
Thus, the input impedance to the filter is

or, [2],


The magnitude of the input impedance is

The input impedances of the two filter configurations are shown in Figure 4.



Next, let’s calculate the frequency at which the input impedances of the two filters are equal. Equating the expressions in equations (6) and (11) produces
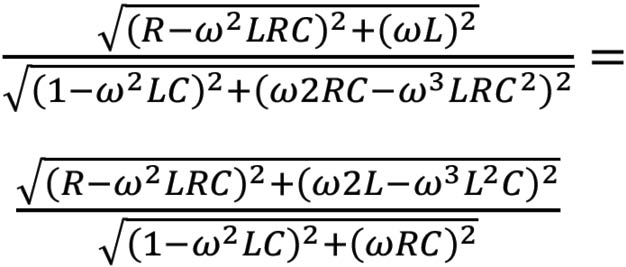
This equation can be solved for ω, [2], resulting in




which are consistent with the values obtained from the simulation in Figure 4.
The simulation results are shown in Figure 6.
At 734 kHz and 1.27 MHz, the insertion losses of the two filters are equal. These are the same frequencies at which the input impedances of the two filters were equal!
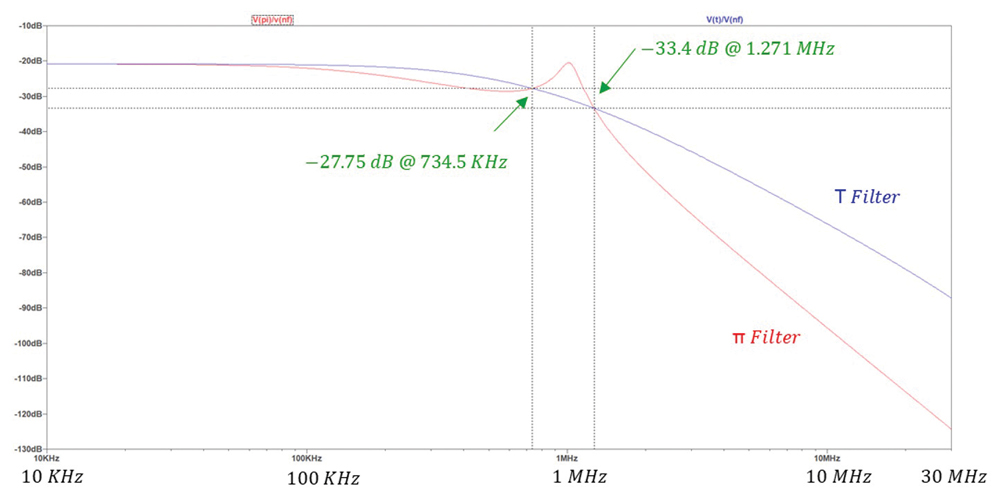
Again, [1], we have arrived at a very important observation: once the filter components values L and C are chosen, we can determine the frequencies at which the insertion losses of π and T filters are equal. These are the frequencies at which the input impedances are equal, given by Equations 14a and 14b.


Note that the measurement results agree with the calculated and simulated results.
References
- Bogdan Adamczyk and Jake Timmerman, “Correlation between Insertion Loss and Input Impedance of EMC Filters – Part 1: LC and CL Filters,” In Compliance Magazine, October 2023.
- Bogdan Adamczyk, Principles of Electromagnetic Compatibility: Laboratory Exercises with Lectures, Wiley, 2024.
- Bogdan Adamczyk and Brian Gilbert, “EMC Filters Comparison Part II: π and T Filters,” In Compliance Magazine, January 2020.

